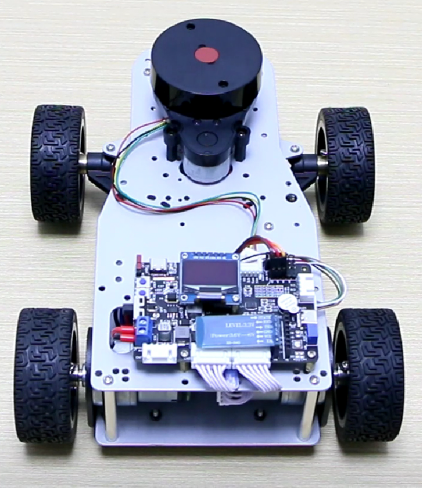
避障巡线雷达-高速履带小车
研发团队:
指导教师:苏力、梁彬、罗幸、辛瑞莉(企业导师)
学生团队:22机器人技术唐君准,22计算机应用工程麦翔皓、李汉玫,23信息安全与管理唐美晶。
技术突破:
1.“一芯多模”融合控制架构
单颗STM32F103RCT6通过中断优先级+状态机调度,同时承载8种工作模式(遥控/雷达避障/跟随/走直线/电磁巡线等)与5路串口实时数据(雷达、蓝牙、手柄、上位机、调试),实现微秒级切换;配合AT8236驱动器过流保护与13线霍尔编码器1:30减速闭环,整机在6-16V宽压下仍可0.1s内完成方向-速度耦合控制,解决了低成本MCU多任务实时性瓶颈。
2.“雷达-电磁”双通道融合导航
乐动LD14激光雷达360°点云与三电感电磁巡线数据在串口中断层做帧同步与角度-距离滤波,实现“巡线途中遇障即停”:误差<2cm,刷新率100Hz;电磁传感器对称排布+中值校准算法,使小车在失去视觉或雷达失效时仍可沿磁轨低速返航,首次在百元级教育平台实现双冗余导航。
产业价值:
1.百元级“履带+导航”模组成为教育/巡检标配
整机BOM<400元,开源原理图、APP、上位机与3D打印件已随货发布,高校/职校可1周内完成课程搭设;过去一年国内电商销量超3万套,带动STM32F1、LD14雷达、AT8236驱动芯片年出货量各增20%+,形成低成本履带导航供应链。
2.“即插即用”二次开发平台缩短商用场景落地周期
预留CAN、UART、I²C总线与5V/5A大电流接口,企业可在车体现成骨架上直接加装机械臂、摄像头或气体传感器,3天即可完成“巡检-消杀-运输”等场景POC;已有多家农业、园区巡检公司基于此底盘在2个月内交付产品,比传统履带底盘方案节省6个月开发时间。
用户登录