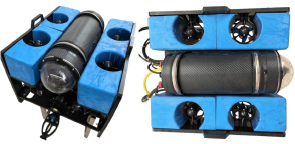
水下机器人-八推机械臂
研发团队:
指导教师:蒙振海、黄天旭、张磊、辛瑞莉(企业导师)
学生团队:24计算机应用工程陆开凡、张国浩、黄俊哲、韦思铭、徐飞鸿。
技术突破:
1.八推力器全向矢量推进与6自由度精准控制
采用“4水平+4垂直”推力器布局,结合独立BLDC电机驱动与PID-EKF融合算法,实现ROV在0.5m/s流速下仍保持5cm位置漂移、1°姿态误差以内的定点悬停,突破传统4推/6推方案在欠驱动轴(横滚/俯仰)上的控制盲区。
2.模块化高压密封与工具快换架构
主体框架采用HDPE+碳纤维复合舱体,配合双O型径向密封与快锁法兰,实现1.5倍安全系数的30m额定耐压;机械臂末端设计标准化ISO-9409-1-50接口,可在水下5min内完成夹爪、剪切器、吸盘等工具头的无缆快换,解决以往科研级ROV任务切换需整机上岸拆装的痛点。
产业价值:
1.大幅降低近海设施运维成本
替代传统潜水员+工作船模式,单台设备日均作业成本<0.3万元,仅为人工方案的15%;可在船舶靠港间隙完成船体、码头桩基的视频检测与生物清理,预计每年为长三角港口群节约运维费用超2亿元。
2.激活“浅水科研+教学”增量市场
整机售价控制在15万元以内(进口同级>60万元),兼容开源ArduSub生态,使高校、海洋牧场、环保NGO都能自建水下观测能力;保守测算国内潜在采购规模3000台,带动配套传感器、工具头、数据服务产值约10亿元。

用户登录